
77페이지에서 83페이지까지 변역해 올립니다.
안정성(Stability)
물체가 균형을 이룰 때, 물체에 작용하는 모든
토크(회전력)는 짝수(even)이고, 물체는
평형 상태(state of equilibrim)에 있다.
이 평형 상태가 얼마나 안전한지 또는 불안정한지는
주로 물체의 무게 중심(중력, Center of Gravity, COG)과
지지기반(base of support)사이의 관계에 달려 있다.
안정성의 원리를 이해하려면 특정 용어를 정의해야 한다.

그림 7-13) 무게중심(COG)은 세 개의 기본 면이 교차하는 지점이다.
중력(gravity)은 지구와 물체 사이의 상호 인력이다.
중력은 항상 지구의 중심을 향해 수직으로 아래로 향한다.
실제로, 중력은 항상 지면을 향한다. 무게중심(COG)은 물체의
균형점으로서, 모든 면의 토크가 같다.
그림 7-13과 같이 물체의 면(plane)이 교차하는 지점이기도 하다.
인체에서 무게중심(COG)는 성인의 두 번째 천골 보다 약간 앞쪽에
위치한다. 연령에 따라 신체비율이 달라지기 때문에
아이의 무게중심(COG)이 어른보다 높다.
이것을 증명하기 위해, 오른팔을 머리 위로 올리고 왼쪽 귀를 만지고.
다음, 세 살짜리 아이에게도 똑같이 해달라고 부탁해본다.
여러분은 귀를 쉽게 만질 수 있는 반면, 아이의 손은 머리 위까지만
닿는다는 것을 알게된다.(그림 7-14).
아이의 머리는 팔과 몸의 나머지 부위의 비율에 비해 훨씬 크다.
흥미롭게도: 레오나르도 드 빈치의 그림으로 유명한 인체 황금 비율은
키와 팔의 길이이다. 성인의 뻗은 팔의 길이는 성인의 키와 같다(그림 7-15).

그림 7-14) 사람의 인체 비율은 성장함에 따라 변한다.

그림 7-15) 성인의 경우, 양 팔 펼침은 신장(키)과 동일하다.
지지기반(Base of Support)는 지지 표면에 접촉하는 물체의 부분이다.
지면에 닿은 몸의 표면을 윤곽으로 본다면 지지기반을 인식할 수 있다.
중력선 (Line of Gravity)은 무게중심을 통과하여 지구의 중심을
향하는 가상의 수직선이다. 이는 그림 7-16에 나와있다.
기본적으로 세 가지 평형 상태(state of equilibrium)가 있다(그림 7-17).
안정된 평형(stable equilibrium)은 물체가 무게중심을
상승시킬 필요가 있는 위치에 있을 때 발생한다.
간단한 예로 벽돌을 들 수 있는데, 벽돌의 가장 넓은 부분이
지지기반(BOS)과 접촉하면 상당히 안정적이다(그림 7-17A).
무너뜨리기 위해서는 벽돌을 어떤 방향으로든 위로 올려야 하고,
따라서 무게중심을 높여야 한다.
무게중심을 붕괴하기 위해, 벽돌은 어떤 방향으로든 뒤집혀져야 하고,
따라서 그것의 무게중심을 높여야 한다. 바닥에 납작 엎드려 있는
사람도 마찬가지라고 할 수 있다.
불안정균형(unstable equilibrium)은 물체를 붕괴하기 위해
약간의 힘만 필요할 때 발생한다.
뾰족한 끝 연필의 균형을 잡는 것이 좋은 예이다.
비슷한 예로 한 발로 서 있는 사람이 있다.
일단 균형을 잡으면, 연필을 넘어뜨리는 데
아주 적은 힘이 든다(그림 7-17B).
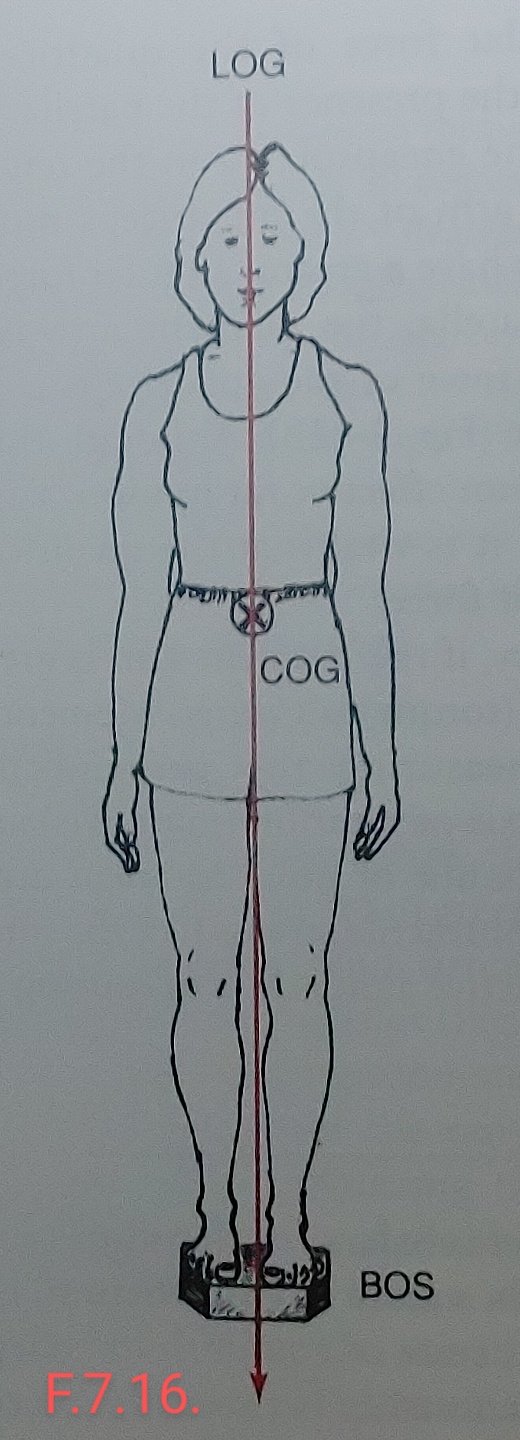
그림 7-16) 무게 중심(COG)은 천골 2번 앞쪽에 있다.
중력선(LOG) 및 지지 기반(BOS)

그림 7-17) 세 가지 균형 상태. (A) 안정. (B) 불안정. (C) 중립.
중립 평형(neutral equilibrium) 은 물체가 방해받을 때
무게중심(COG)가 상승하거나 하강하지 않을 때 존재한다.
좋은 예는 공이다. 공이 바닥을 가로질러 굴러가는 동안
무게는 그대로 유지된다(그림 7-17C).
다음 원칙들은 균형(balance), 안정성(stability),
움직임(motion)사이의 관계를 보여준다.
1. 무게중심이 낮을수록 물체는 안정적이다. 그림 7-18에서,
두 삼각형은 동일한 지지 기반을 가지고 있다. 그러나
왼쪽 삼각형은 오른쪽 삼각형보다 높고 무게중심이 높으므로 불안정하다.
키큰 삼각형을 붕괴하는 것은 힘이 덜 들 것이다.

그림 7.18) 안정성과 무게중심의 높이와의 상호 관계
(A) 무게중심이 높아 덜 안정적, (B) 무게중심이 낮아 안정적
2. 물체가 안정적으로 유지되려면 무게중심과 중력선이
지지기반( BOS) 내에 있어야 한다. (중력선(LOG)은 무게중심(COG)을
통과한다. 명확성을 위해, 이 시점부터, 무게중심(COG)라는
용어를 사용할 것이다.
지지기반(BOS)이 넓을수록 물체는 더 안정적이다.
그림 7-19의 예에서 이 책은 완전히 지지기반(BOS, 테이블 위)에
놓여 있어 상당히 안정적이다. 가장자리를 밀어낼수록 안정성이 떨어진다.
무게중심(COG)이 더 이상 지지기반(BOS)를 넘어서지 않을 때,
그 책은 떨어질 것이다.

그림 7-19) 무게중심과 지지기반의 상호관계
(A) 무게중심이 지지기반(BOS)의 중간에 있기 때문에
책은 매우 안정적이다.
(B) 무게중심이 지지기반의 가장자리에 가까이 있기 때문에
책의 안정성이 떨어진다.
(C) 무게중심이 지지기반을
벗어나기 때문에 책은 불안정하고 떨어질 것이다.
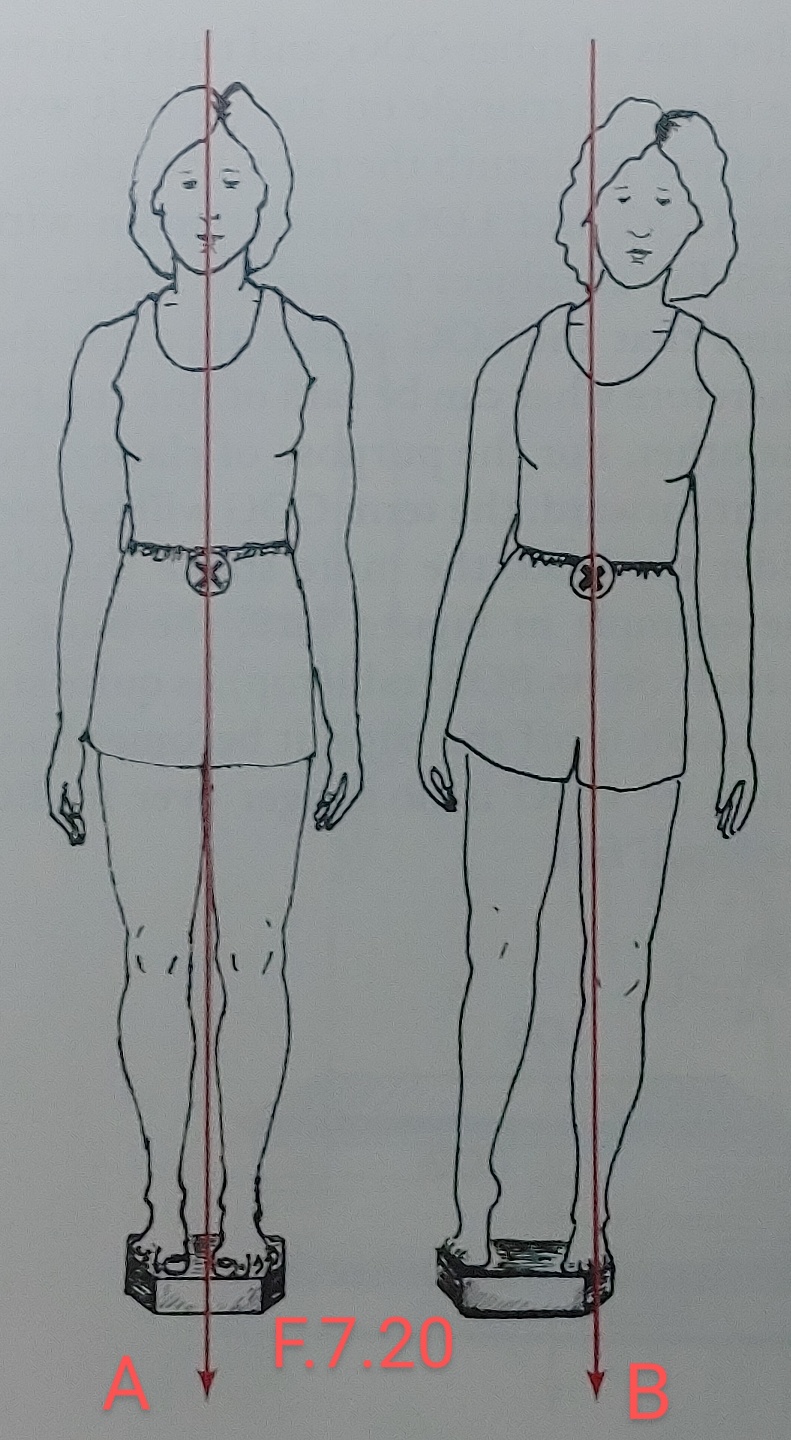
그림 7-20) 무게중심과 지지기반의 상호 관계.
(A) 안정적이다 - 그녀의 무게중심은 그녀의 지지기반의 중간에 있다.
(B) 무게중심이 지지기반의 가장자리에 가깝기 때문에 덜 안정적이다.
또 다른 예는 두 발로 직립자세로 서 있는 여성이다(그림 7-20).
그녀의 무게중심은 지지기반의 중심 또는 그 근처에 있다.
몸을 옆으로 기울이면서, 그녀의 무게중심은 지지기반의 경계선을 향해 움직인다.
자신의 무게중심이 지지기반( BOS)를 넘어가는 순간 불안정해지고,
자세가 교정되지 않거나 지지기반( BOS)이 넓어지면 넘어진다.
균형을 잃지 않고 더 기대기 위해 그녀는 반대쪽 팔을 뻗거나
자세를 넓힐 수 있다. 어떤 경우든, 그녀의 무게중심은
지지기반(BOS) 위로 되돌아갈 것이다.
3. 지지기반이 힘의 방향으로 넓어질수록 안정성이 높아진다.
바람이 많이 부는 날 버스정류장에 서 있는 사람은 바람을
마주하고 한 발은 앞쪽으로, 다른 발 뒤로 놓았을 때
더 안정적이어서 지지기반을 바람 부는 방향으로 넓힐 수 있다(그림 7-21).
4. 물체의 질량이 클수록 안정성은 커진다. 이 개념은 미식축구팀
선수들의 크기를 보면 관찰된다. 라인배커(linebackers)는
대체적으로 몸이 무거워서 밀기가 더 어렵다.
공을 가지고 뛰는 하프백(halfbacks)이 훨씬 몸이 가볍다.
무거움으로 안정감을 얻을 시 속도를 상실되고
속도를 얻으면 안정감을 상실한다.
5. 지지면과 지지기반( BOS) 사이의 마찰이 클수록 차체가 더 안정된다.
얼음과 신발 사이에 마찰이 본질적으로 없기 때문에
얼음 길을 걷는 것은 미끄러움을 느낀다.
보도에 샌딩(sanding)을 하면 빙판 표면의 마찰력(friction)이
증가하여 견인(traction)이 향상된다. 마찰력이 많은 표면을
갖는 것이 항상 바람직한 것은 아니지만, 딱딱한 나무 바닥을
가로질러 휠체어를 미는 것은 카펫이 깔린 바닥을 가로질러
휠체어를 미는 것보다 훨씬 쉽다.
카펫은 더 많은 마찰을 일으켜 휠체어를
밀어내는 것을 더 어렵게 만든다.
6. 사람들은 움직이는 물체보다 정지해 있는 물체에 집중하면
움직이는 동안 균형을 더 잘 잡는다. 그러므로, 목발을 짚고
걷는 것을 배우는 사람들은 움직이는 발이나 목발을 내려다보는
것보다 복도 아래쪽에 있는 물체에 초점을 맞추는 것이 더 안정적일 것이다.

그림 7-21) 힘의 방향으로 지지기반이 넓어질수록 안정성이 높아진다.
간단한 기계(simple machines)
공학에서, 다양한 기계들은 힘의 크기와 방향의 변화를 위해 사용된다.
4가지의 간단한 기계는 지렛대(lever), 드르레(pully),
바퀴(wheel), 축(axle), 그리고 경사면(inclined plane)이다.
경사면을 빼면 이러한 기계들의 경우와 같은 것은
인체에서 발견된다. 지렛대, 바퀴, 차축, 경사면은 사람이
근육의 힘으로만 사용하여 일하는 것보다
더 큰 힘으로 일할수 있게 한다.
도르래는 힘을 더 효율적으로 가할 수 있도록 한다.
기계적 이점 측면에서 표현될 수 있으며, 힘의 증가는
대개 속도를 소비함으로 이루어 진다. 이는 나중에 설명될 것이다.
지렛대(lever)
세 가지 종류의 지렛대가 있으며, 각각 용도와 기계적 이점이 다르다.
우리는 다양한 활동을 할 수 있도록 지렛대를 늘 사용한다.
손수레, 쇠지렛대, 수동 깡통따개, 가위, 골프채, 테니스 라켓,
그리고 운동장 시소들은 몇 가지 예에 불과하다.
다른 종류의 지렛대는 인체에서도 발견될 수 있다.
지렛대의 구조와 기능을 이해하려면 특정 용어를 숙지한다.
지렛대는 저항을 극복하기 위해 힘을 가할 때 고정된 지점(fixed point)을
중심으로 회전할 수 있는 단단한 막대이다. 지렛대가 회전하는
고정점은 축(A)이며, 때때로 받침점(지렛목, fulcrum)지점이라고도 한다.
인체에서 지렛다를 움직이게 하는 힘(F)은 보통 근육이지만 항상은
그렇지 않다. 움직임(motion)이 발생하기 위해 극복해야 하는
저항(R)은 움직이는 부위의 무게, 중력 또는 외부 무게를 포함할 수 있다.
힘팔(FA)은 힘의 선과 축(axis) 사이의 수직 거리, 즉 길이이고,
저항 팔(RA)은 저항선과 축 사이의 수직 거리, 즉 길이이다(그림 7-22).
힘 F와 저항 R에 대한 축 A의 배열이 지렛대의 유형을 결정한다.

그림 7-22) 지렛대 구성 요소

그림 7-23) 1등급 지렛대 FAR(F = 힘: A = 축, R = 저항)
지렛대 종류(등급)
1등급 지렛대에서 축(axis)은 힘과 저항 사이에 위치한다.

이것을 설명하는 좋은 예는 놀이터 시소이다(그림 7-23).
시소는 보드(널빤지)의 한쪽 끝에 앉아 땅으로 밀치고 다른 쪽 끝에
앉아 있는 아이의 몸무게 사이의 어딘가에 위치한 크로스바를 타고 회전한다.
2등급 지렛대의 한쪽 끝에는 축이 있고, 가운데에는
저항이 있고, 다른 끝에는 힘이 있다.
손수레는 2등급 지렛대이다(그림 7-24). 앞쪽 끝의 바퀴가 축이고,
손수레의 내용물이 저항이며, 손수레를 밀고 있는 사람이 힘이다.
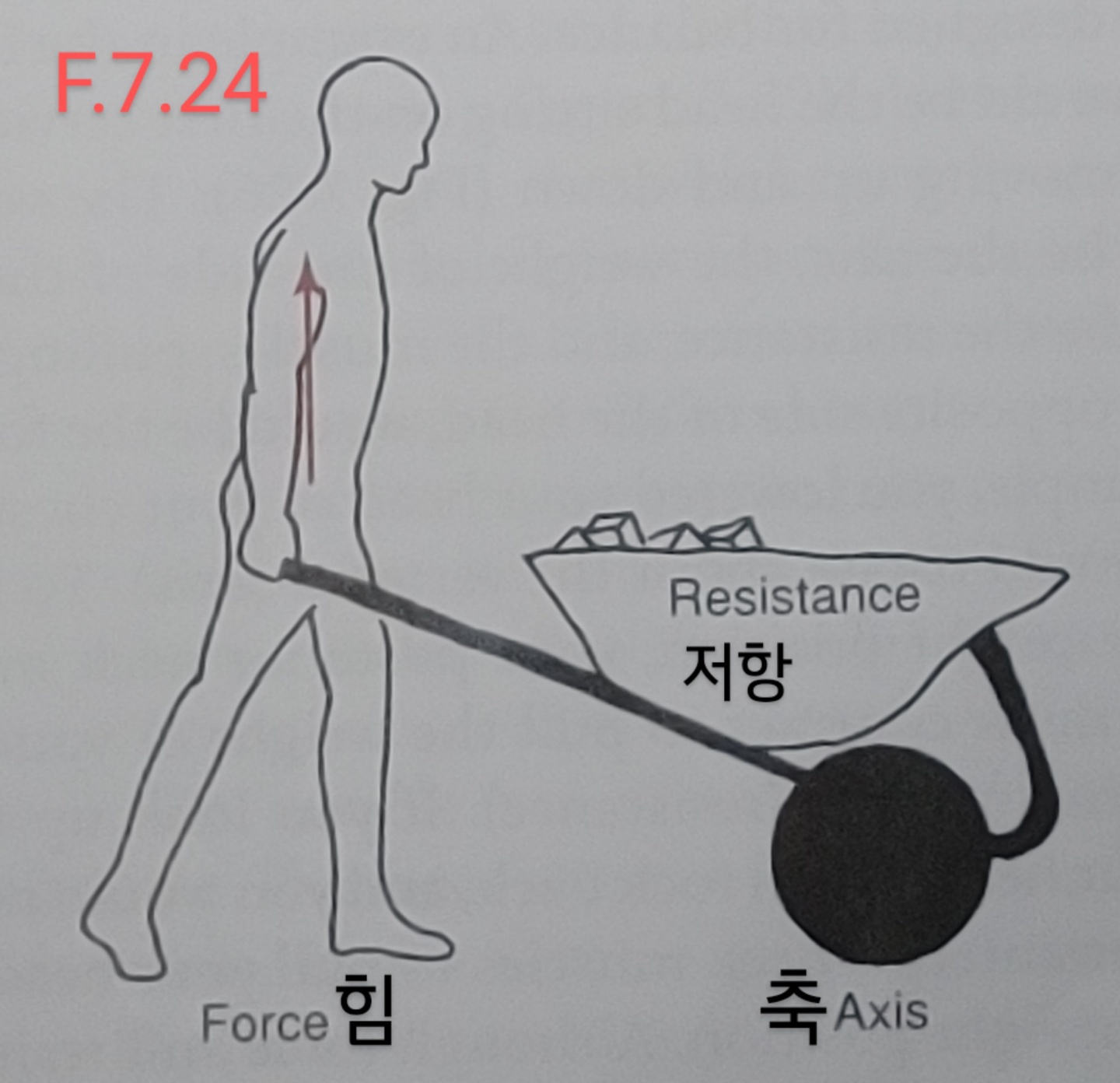
그림 7- 24) 2등급 지렛대. FRA(F= 힘, R = 저항, A = 축).

그림7-25) 3등급 지렛대
3등급 도르레의 한쪽 끝에는 힘이 중앙에 있고 반대쪽 끝에는 저항이 있다.
이러한 유형의 지렛대의 예로는 스프링 부착 장치가 있는
스크린 도어가 있다(그림 7-25). 축은 문 경첩, 힘은 문을 닫는
스프링, 저항은 문 그 자체다.
언급한 바와 같이, 각 지렛대는 서로 다른 목적 또는 기계적 이점을 가지고 있다.
1등급 지렛대는 균형을 위해 가장 잘 설계되어 있다.
인체의 예로는 경추 1번(altals)에 있는 머리로 위아래로 움직임을 가진다.
(그림 7-26). 척추는 축이 되고, 머리의 한 쪽 무게는 저항이 되며,
머리의 반대쪽을 잡아당기는 근육은 힘이 된다.
예를 들어, 머리를 가슴으로 숙일(굴곡) 경우, 머리는 척추(축)를 중심으로 회전한다.
직립자세로 돌아가려면,
여러분의 뒷목 근육(힘)이 중력(저항)에 맞서는 머리 무게를
위로 당기기 위해 수축해야 한다.
만약 여러분이 하늘을 올려다본다면, 머리는 뒤로 갈것이고,
머리를 직립자세 위치로 다시 당기기 위해, 앞목 근육을 사용할
필요가 있다. 힘과 저항이 위치를 바꿀 수 있지만, 움직임에 따라
축은 항상 가운데에 있다.
2등급 지렛대는 힘에 가장 잘 사용되며, 인체에는 놀랍게도 예가 거의 없다.

그림 7.26) 1등급 지렛대
대부분의 전문가들은 그 힘이 동심원적(중심이 같은, concentric)으로
수축하는 근육인 인체에 순수 2급 지렛대는 없다고 믿는다.
어떤 이들은 사람이 발끝으로 서 있을 때 발목 족저굴곡근(plantar flexion)의
작용의 예를 든다. (그림 7-27). 이 경우, 축은 발바닥에 있는
중족골 관절(metatarsophalangal joint)이고, 저항은 경골이고 그 위의 나머지 인체 무게는 발목 족저굴곡에 의해 힘이 제공된다.
보시다시피, 족저굴곡근은 관절을 아주 크게 움직일 필요는 없지만,
극복해야 할 무게나 저항력이 매우 크다.

그림 7-27) 2등 지렛대.

그림 7-28) 3등급 지렛대
3등급 지렛대의 장점은 관절가동범위(ROM, 또한 속도와 거리라고 하는)이다.
단연코 신체에서 가장 흔한 지렛대이고, 예로는 팔꿈치 굴곡근 중 하나인
상완이두근(bicps muscle)이다(그림 7-28). 축은 팔꿈치(주) 관절이고,
힘은 요골 근위(위쪽)에 부착된 상완이두근 근육에 의해 가해지는 힘이며,
저항력은 팔뚝과 손의 무게이다.
손이 완전하게 작용하기 위해서는 관절가동범위를 통해
움직일 수 있어야 한다. 저항은 손에 무엇이 있느냐에 따라진다.
관절가동범위(ROM,속도와 거리)을 선호하는 3등급 레버가
왜 이렇게 많고, 힘을 선호하는 2등급 레버가 왜 이렇게 적은가.
아마도 관절가동범위가 증가하면 얻는 장점이 힘이 증가하면
얻는 장점보다 더 중요하기 때문일 것이다.
팔꿈치 굴곡근에서 상완이두근과 상완요골근(brachioradialis)의
역할을 조사한다(그림 7-29).
이 두 근육은 다 팔꿈치에 걸쳐 있지만 아주 다른 위치의
요골(radius)에 정지된다. 상완이두근은 요골의 근위부(proximal end)에 정지되어 있고,
상완요골근은 원위부(disital end)에 정지되어 있다.
상왼이두근은 축(팔꿈치)과 저항(전완) 사이에 정지되기 때문에
3등급 지렛대의 힘으로 작용한다.
상완요골근은 2급 지렛대의 힘인데, 이는 지렛대 암(lever arm)의
끝에 정지되어 저항(전완)을 가운데에 놓기 때문이다.
예를 들어, 각각의 근육이 약 4인치 수축할 수 있다고 하자.
근육은 휴지기길이(resting length)의 절반으로 짧아질 수
있다는 것을 기억하라. 따라서, 상완요골근은 전완의 말단 끝(disital end)을
움직일 수 있을 것이고, 따라서 손이 말단 근처에 있기 때문에
손이 약 4인치 움직일 수 있을 것이다. 근위말단(proximal end)에
정지되어 있는 상완이두근은 전완의 근위말단을 약 4인치
이동시킬 것이고, 이것은 원위말단의 손을 훨씬 더 멀리 이동시킬 것이다.

그림 7-29) 3등급 지렛대는 거리를 선호하고(A),
2등급 지렛대는 힘을 선호한다(B)
상지(upper extremity)의 주요 기능은 손이 넓은 범위에서 움직일 수
있도록 하는 것이기 때문에, 이러한 근육의 대부분이
3급 지렛대로 작용하는 것이 이치에 맞는다.
교육 & 관리 문의: TECacdemy 남태열 01038616051
'근육학 교육 ' 카테고리의 다른 글
| CHAPTER 8 어깨대( Shoulder Girdle)의 복습& 시험 (0) | 2022.05.25 |
|---|---|
| Clinical Kinesiology & Anatomy 8장 part 2 (5) | 2022.05.23 |
| Clinical Kinesiology and Anatomy: 번역본, 제 7장 기본 생체역학 Part 1 (0) | 2022.04.15 |
| 터칭이모션:근육학 졸업 (0) | 2018.11.02 |
| 수요일 근육학수업: 열정은 더위를 넘고 (0) | 2018.07.20 |



